一、进程同步和进程互斥的概念
核心概念:介绍进程同步和进程互斥的基本定义及其相互关系
1.1 什么是进程同步?
- 异步性定义:各并发执行的进程以各自独立的、不可预知的速度向前推进
- 同步必要性:当进程间需要协调工作时,必须解决异步性带来的执行顺序不确定问题
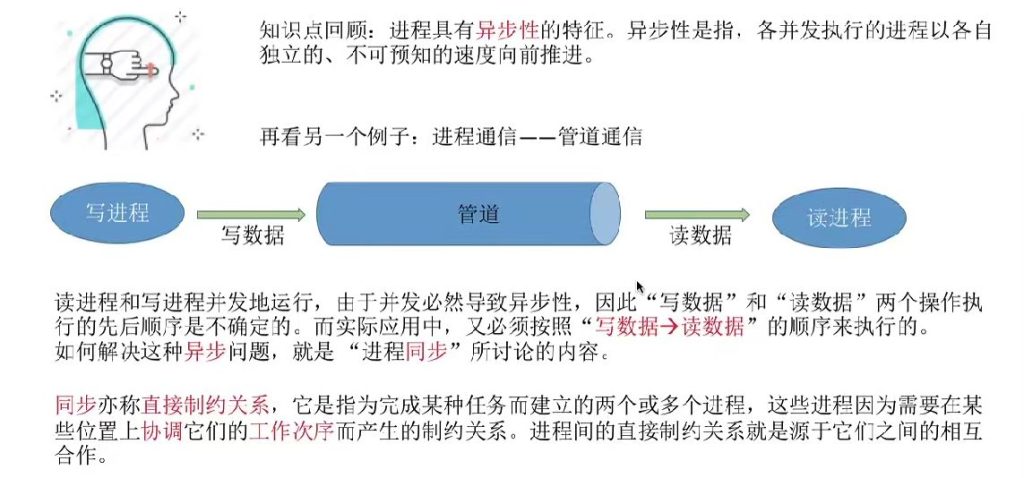
- 典型场景:写进程和读进程并发执行
- 同步要求:必须保证”写数据”操作在”读数据”操作之前完成
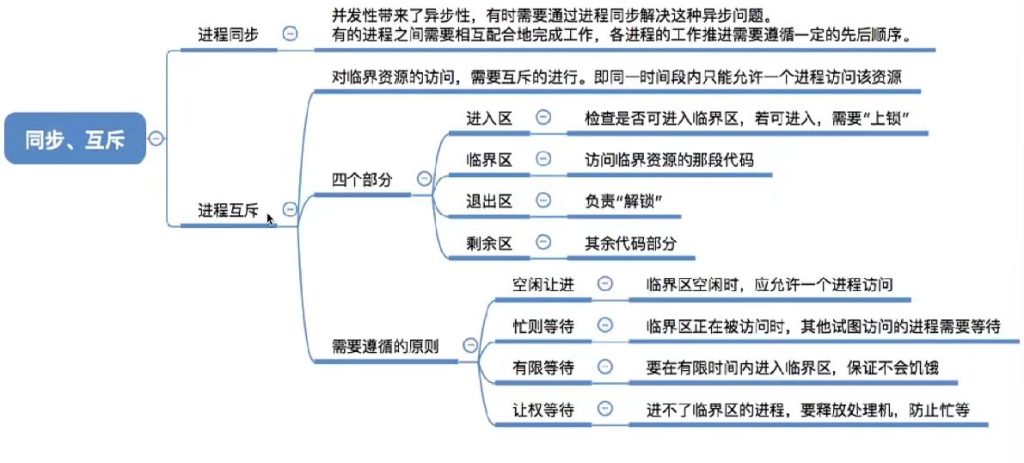
- 同步定义:又称直接制约关系,指进程间需要协调工作次序的合作关系
1.2 什么是进程互斥?
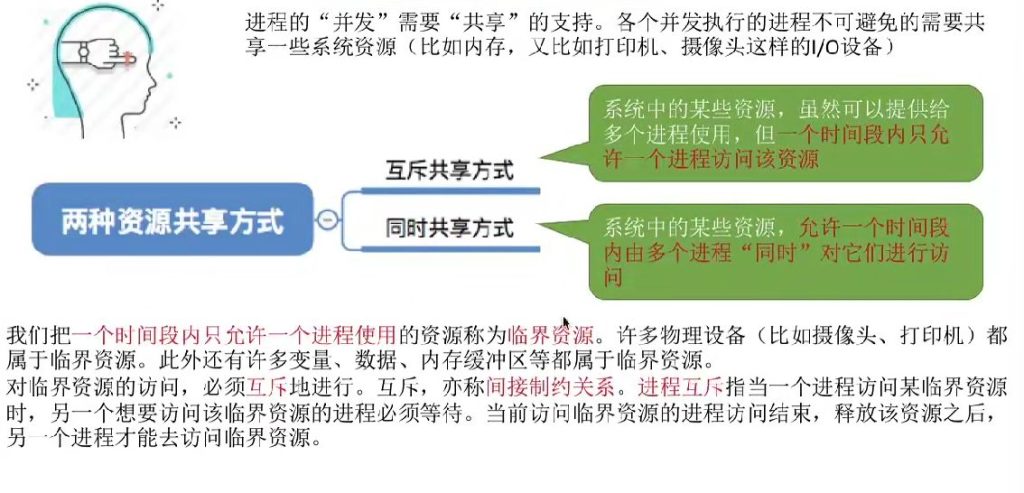
- 互斥共享:一个时间段内只允许一个进程访问(如打印机)
- 同时共享:宏观上允许多个进程同时访问(微观上交替访问)
1.3 进程互斥访问的四个组成部分
临界资源的定义
- 定义:一次仅允许一个进程使用的系统资源
- 典型示例:打印机、摄像头等硬件设备,以及某些共享内存区域
对临界资源的互斥访问
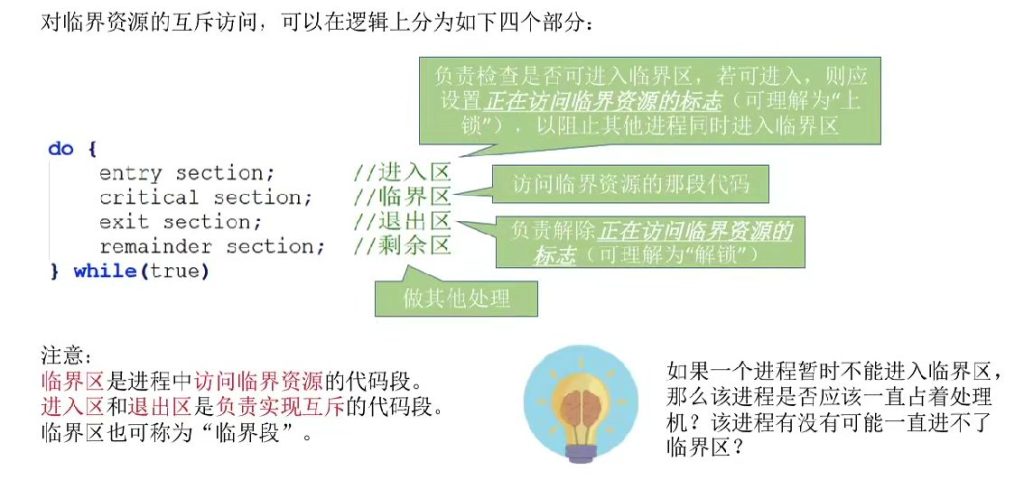
- 四个逻辑部分:
- 进入区:检查并上锁(设置访问标志)
- 临界区:实际访问临界资源的代码段(又称临界段)
- 退出区:解锁(清除访问标志)
- 剩余区:其他处理代码
- 易混淆点:注意区分进入区(检查上锁)和临界区(实际访问)的功能差异
1.4 进程互斥的原则
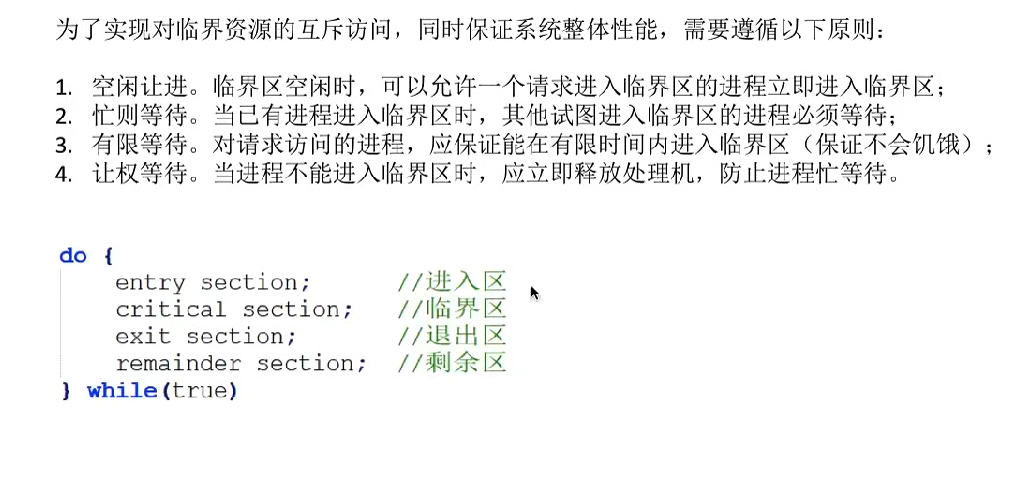
- 四大原则:
- 空闲让进:临界区空闲时应立即允许一个进程进入
- 忙则等待:临界区被占用时其他进程必须等待
- 有限等待:等待时间必须是有限的(防止饥饿)
- 让权等待:无法进入时应释放处理机(防止忙等)
1.5 知识回顾
- 概念对比:
- 同步(直接制约):进程间有直接合作关系
- 互斥(间接制约):进程间因共享资源产生制约
- 关键记忆点:
- 临界区访问的四个逻辑部分及其功能
- 互斥访问的四个原则(空闲让进、忙则等待、有限等待、让权等待)
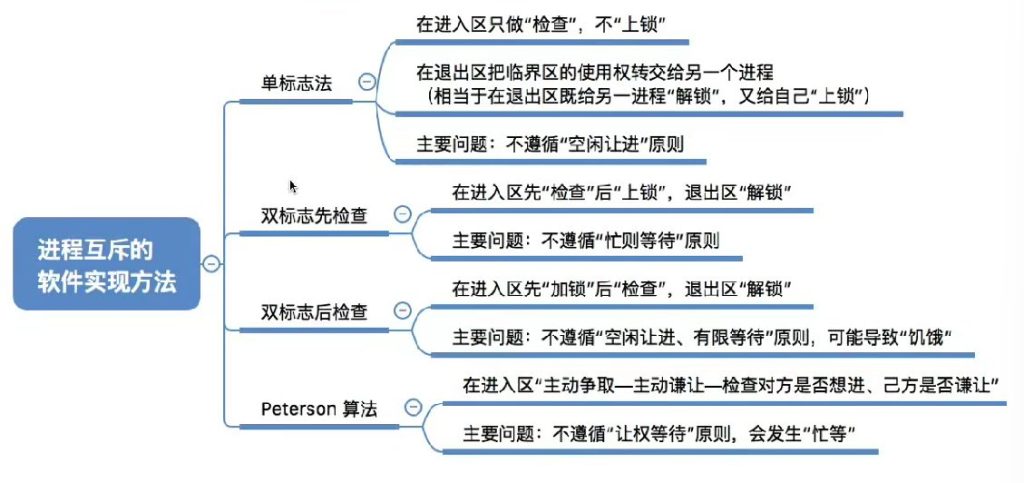
二、进程互斥的软件实现方式(高频考点)
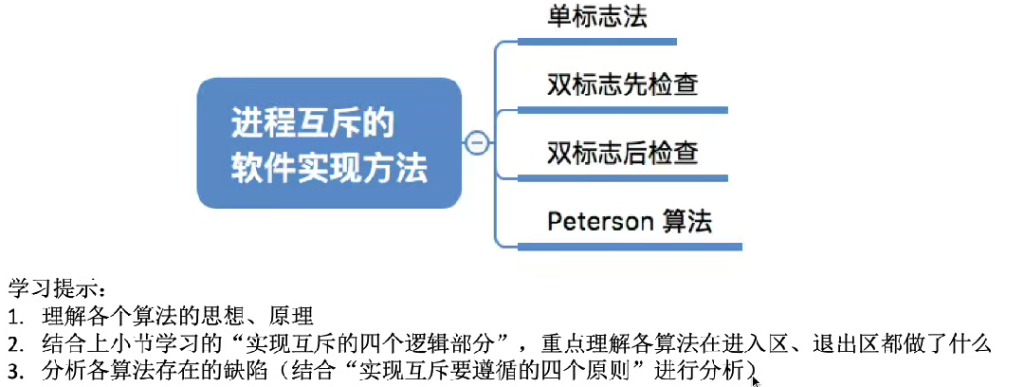
进程互斥的软件实现方法包括单标制法、双标志先检查法、双标志后检查法和皮特森算法。其中,单标制法用变量表示谦让,双标志法用数组表示进入意愿,皮特森算法结合两者,通过主动争取和谦让实现互斥。这些算法各有优缺点,需理解其背后的逻辑和原理,并结合课后习题巩固。
2.1 如果没有进程互斥?
1.进程互斥的定义:确保多个进程在访问共享资源时不会相互干扰。
2.缺乏进程互斥的后果:可能导致数据不一致或其他错误。
3.进程互斥的实现方法:通过软件或硬件实现。
2.2 单标志法
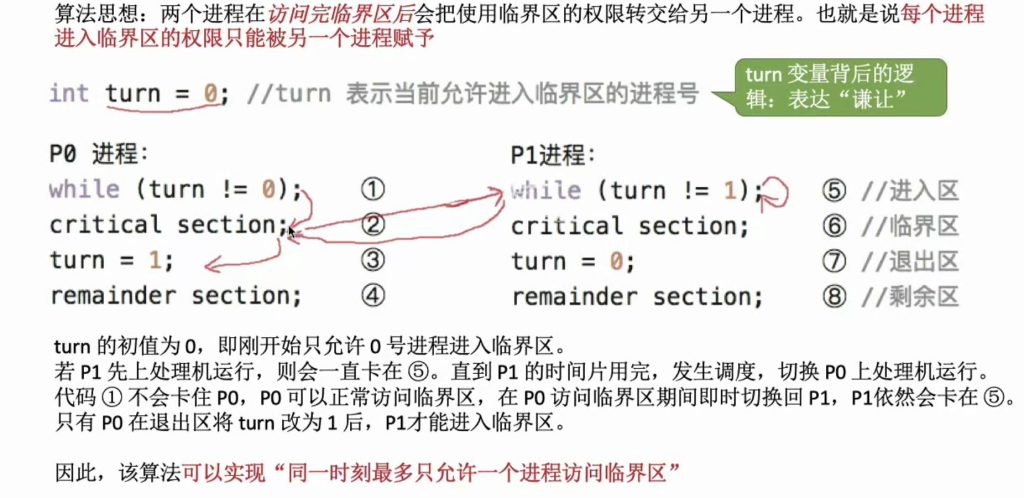
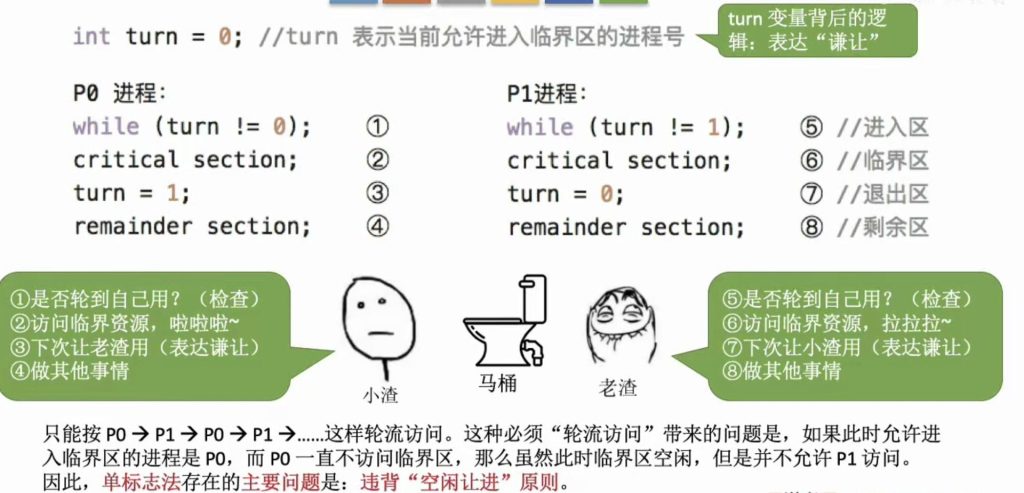
1.算法思想:通过设置一个turn变量,表示当前允许哪个进程进入临界区。
2.算法步骤:每个进程在进入区检查turn的值,如果不等于自己的编号,则等待。
3.例子:通过谦让的方式,一个进程在退出区将turn的值设为另一个进程的编号。
4.缺点:只能轮流使用临界区,违反空闲让进原则。
2.3 双标志先检查法
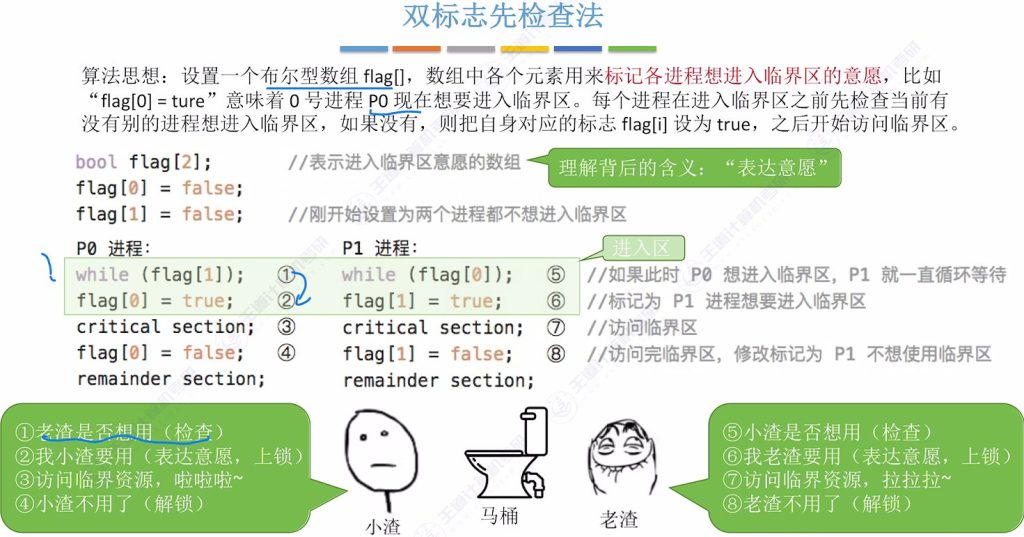
1.算法思想:通过设置一个flag数组,标记各个进程是否想要进入临界区。
2.算法步骤:每个进程在进入区检查对方是否想要进入临界区,如果对方不想进入,则自己进入。
3.例子:通过上锁和解锁的方式,表示自己想要使用临界区的意愿。
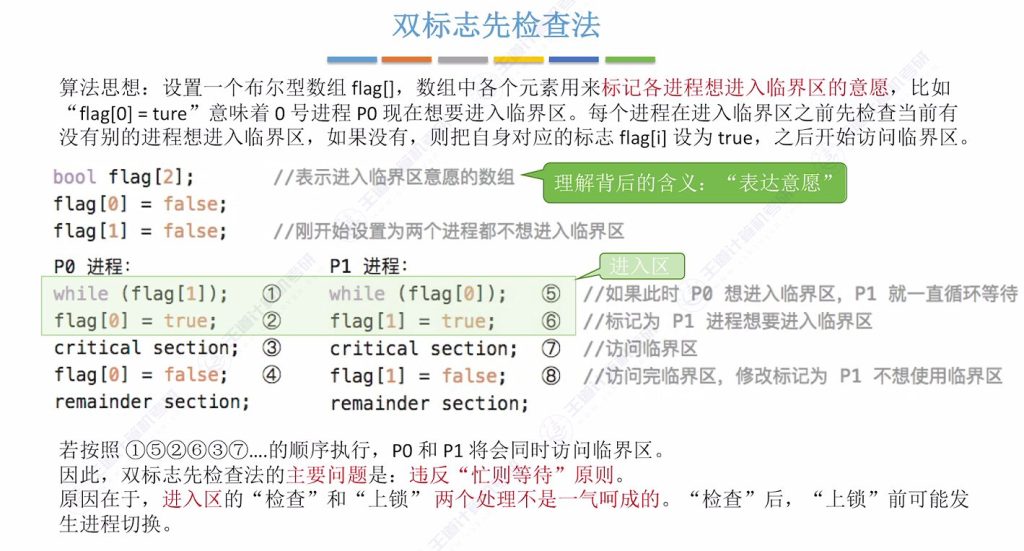
4.缺点:在并发环境下可能违反忙则等待原则。
2.4 双标志后检查法
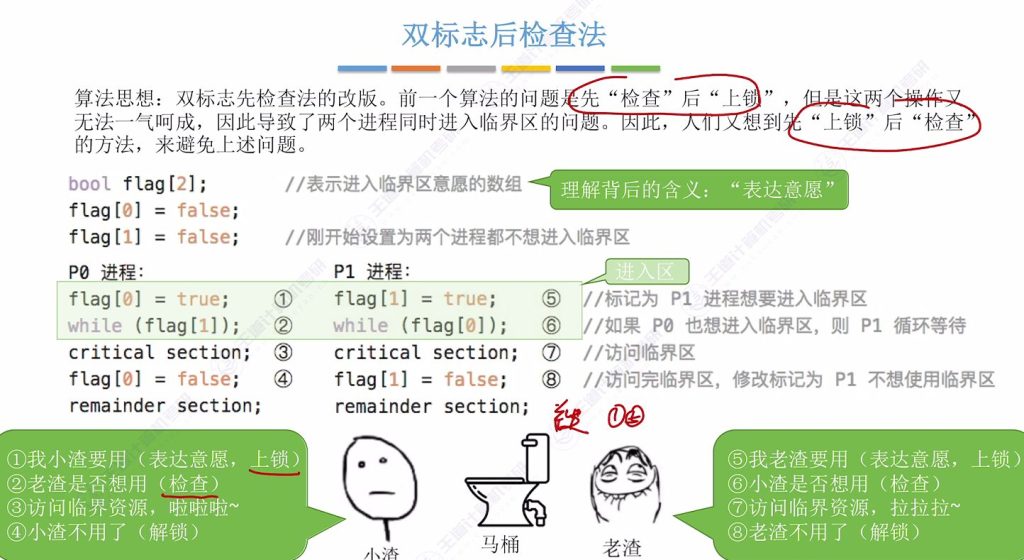
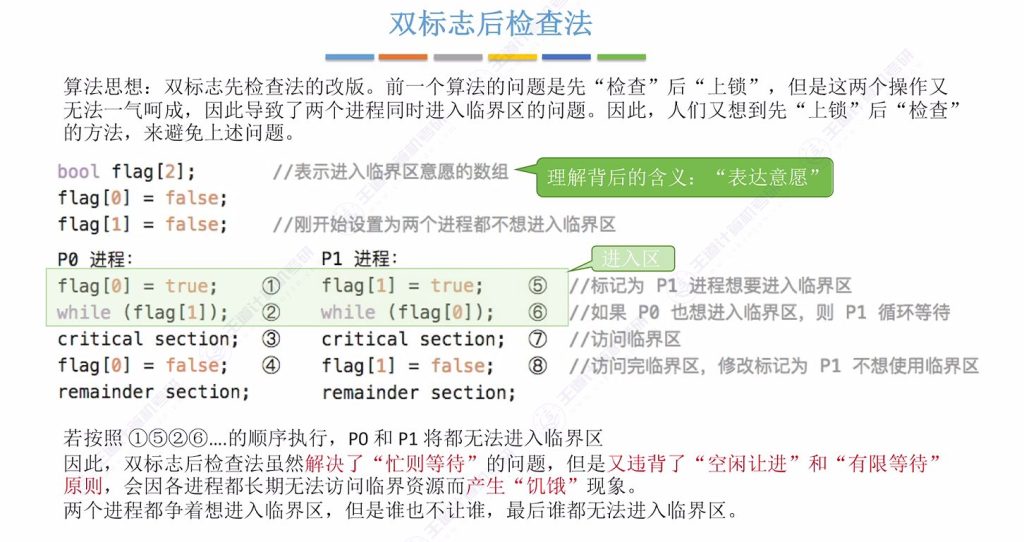
1.算法思想:先进行上锁操作,再进行检查操作。
2.算法步骤:每个进程在进入区先上锁,再检查对方是否想要进入临界区。
3.例子:通过上锁和解锁的方式,表示自己想要使用临界区的意愿。
4.缺点:可能违反空闲让进和有限等待原则。
2.5 Peterson 算法
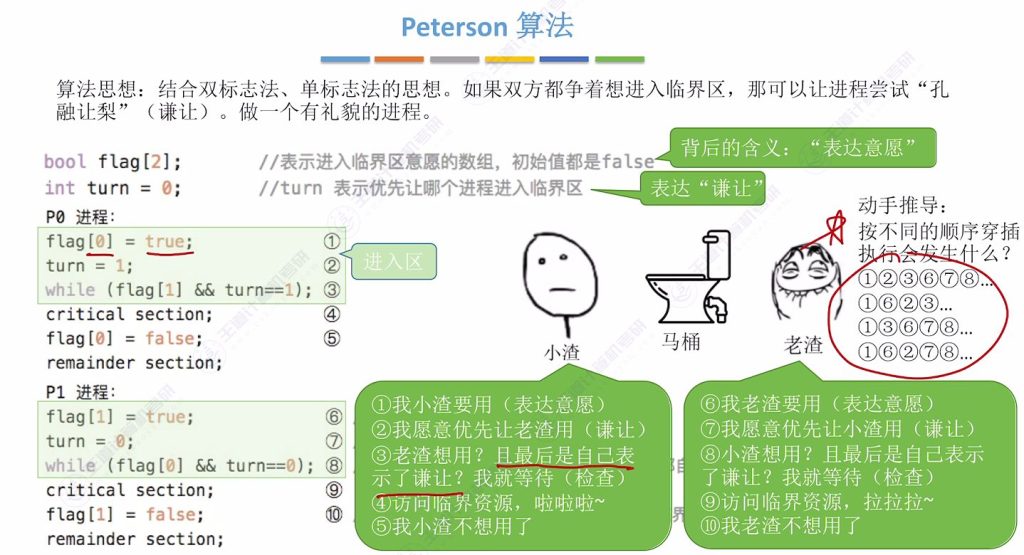
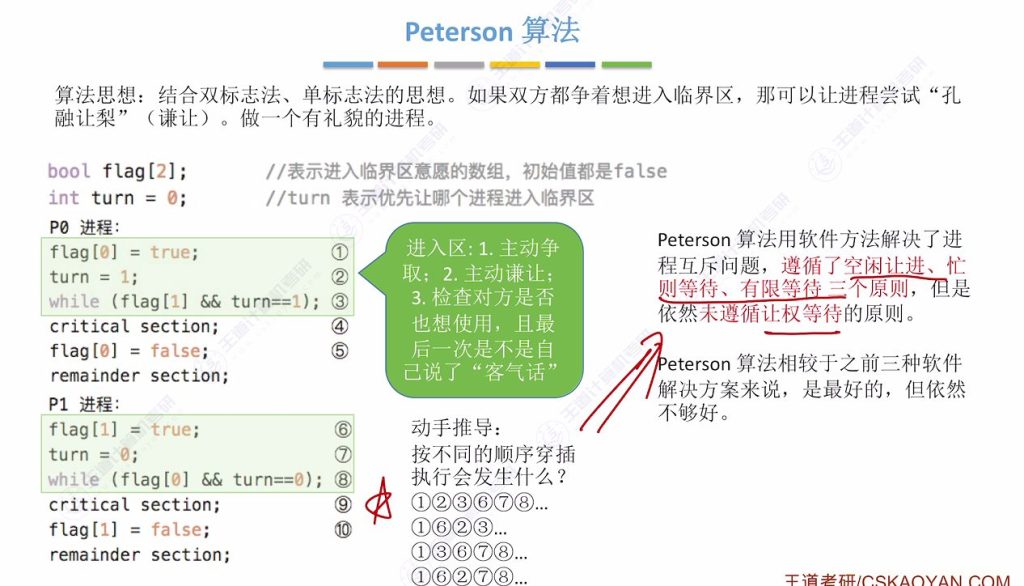
1.算法思想:结合双标志法和单标志法的核心思想。
2.算法步骤:每个进程在进入区表达自己想要进入临界区的意愿,并进行谦让。
3.例子:通过谦让的方式,确保只有一个进程能够进入临界区。
4.优点:实现了空闲让进、忙着等待和有限等待原则。
5.缺点:没有遵循让权等待原则。
2.6 知识回顾
进程互斥软件实现方法重点要点分析
一、核心概念与重要性
1.1 互斥的必要性
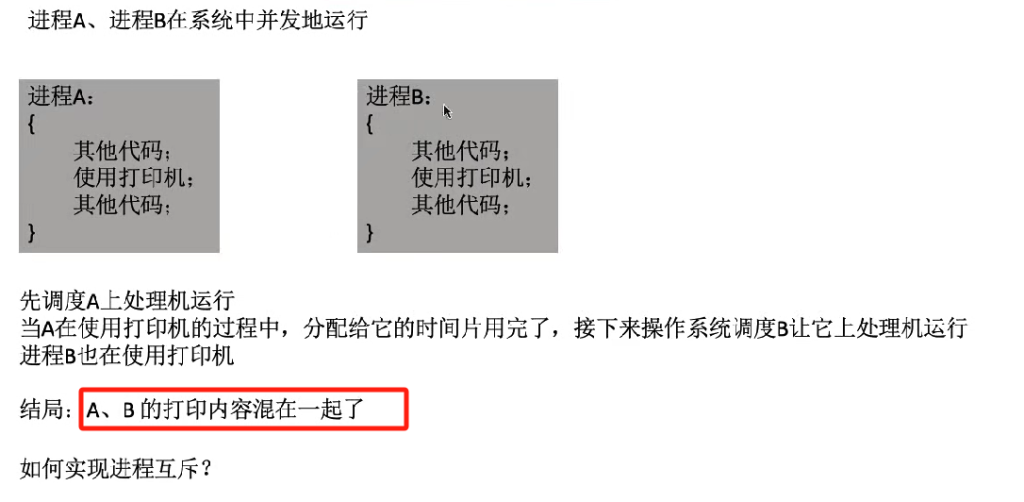
- 问题背景:多个进程并发访问同一临界资源时,可能导致资源使用冲突
- 典型例子:两个进程同时使用打印机,导致打印内容混乱
- 解决目标:确保同一时刻只有一个进程能访问临界资源
1.2 考察重点
- 考试频率:非常高,经常出现在选择题和大题中
- 学习要求:
- 理解各种算法的思想和原理
- 掌握进入区、临界区、退出区的代码逻辑
- 分析每种算法的优缺点
- 结合互斥实现的四个原则进行评价
二、互斥实现的四个原则
2.1 空闲让进
- 当临界区空闲时,应允许想要进入的进程立即进入
2.2 忙则等待
- 当临界区被占用时,其他进程必须等待
2.3 有限等待
- 等待进程不能无限期等待,必须在有限时间内获得访问权
2.4 让权等待
- 等待的进程应释放CPU资源,不应占用CPU进行忙等
三、四种软件实现算法详解
3.1 单标志法(Single Flag Method)
核心思想
- 设置变量
turn表示当前允许哪个进程进入临界区 - 进程访问完临界区后,将使用权转交给另一个进程
实现机制
进入区:while(turn != 自己的编号); // 检查是否轮到自己
临界区:// 访问临界资源
退出区:turn = 对方编号; // 谦让给对方
剩余区:// 其他处理
优点
- 可以实现互斥访问
- 逻辑简单清晰
缺点
- 违反空闲让进原则:必须轮流使用,即使对方不需要使用资源
- 缺乏灵活性
3.2 双标志先检查法(Double Flag Check-First Method)
核心思想
- 设置布尔数组
flag[]标记各进程是否想要进入临界区 - 先检查对方是否想要进入,再表达自己的意愿
实现机制
进入区:
while(flag[对方] == true); // 检查对方是否想要进入
flag[自己] = true; // 表达自己想要进入的意愿
临界区:// 访问临界资源
退出区:flag[自己] = false; // 表示不再需要访问
优点
- 思路合理:先检查后上锁
缺点
- 违反忙则等待原则:可能导致两个进程同时进入临界区
- 根本问题:检查和上锁两个动作不能一气呵成,中间可能发生进程切换
3.3 双标志后检查法(Double Flag Check-Last Method)
核心思想
- 与先检查法类似,但改为先上锁再检查
实现机制
进入区:
flag[自己] = true; // 先表达自己想要进入的意愿
while(flag[对方] == true); // 再检查对方是否想要进入
临界区:// 访问临界资源
退出区:flag[自己] = false; // 表示不再需要访问
优点
- 解决了忙则等待问题,不会有两个进程同时进入临界区
缺点
- 违反空闲让进原则:可能导致两个进程都无法进入临界区
- 违反有限等待原则:可能导致进程无限等待,产生饥饿现象
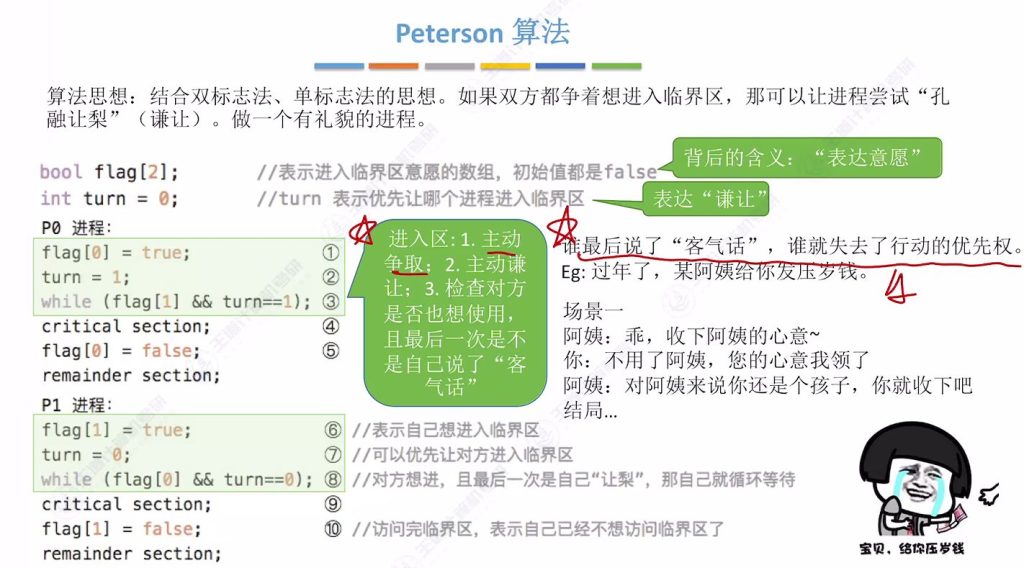
3.4 皮特森算法(Peterson’s Algorithm)
核心思想
- 结合双标志法和单标志法的精髓
- 每个进程既表达进入意愿,又主动谦让
实现机制
进入区:
flag[自己] = true; // 表达想要进入的意愿
turn = 对方编号; // 主动谦让,让对方优先
while(flag[对方] == true && turn == 对方编号); // 检查条件
临界区:// 访问临界资源
退出区:flag[自己] = false; // 表示不再需要访问
算法逻辑分析
- 主动争取:表达自己想要进入临界区的意愿
- 主动谦让:表示愿意让对方先进入(类似说客气话)
- 条件检查:检查对方是否也想要使用,且最后是否是自己说了”客气话”
优点
- 满足空闲让进:临界区空闲时,想要进入的进程可以进入
- 满足忙则等待:不会有两个进程同时进入临界区
- 满足有限等待:等待时间有限,不会无限等待
缺点
- 违反让权等待原则:等待进程仍占用CPU进行忙等(while循环)
四、算法核心思想总结
4.1 两个核心概念
- 谦让:通过turn变量实现进程间的相互谦让
- 表达意愿:通过flag数组表达进程想要进入临界区的意愿
4.2 生活化理解
- 可以用”排队使用马桶”的例子来理解
- 皮特森算法类似于”有礼貌的排队”:既表达需求,又主动谦让
- “最后说客气话的人失去优先权”这一原则很好地解释了算法逻辑
五、算法比较与评价
| 算法 | 空闲让进 | 忙则等待 | 有限等待 | 让权等待 | 主要问题 |
|---|---|---|---|---|---|
| 单标志法 | ❌ | ✅ | ✅ | ❌ | 必须轮流使用 |
| 双标志先检查法 | ✅ | ❌ | ✅ | ❌ | 可能同时进入 |
| 双标志后检查法 | ❌ | ✅ | ❌ | ❌ | 可能都无法进入 |
| 皮特森算法 | ✅ | ✅ | ✅ | ❌ | 忙等占用CPU |
六、学习建议与解题技巧
6.1 学习方法
- 不要直接钻入代码细节,要理解算法背后的逻辑
- 结合生活实例(如排队使用资源)来理解
- 重点掌握每种算法的核心思想
6.2 解题技巧
- 遇到软件实现互斥的题目,抓住”谦让”和”表达意愿”两个核心思想
- 分析算法时,要考虑并发执行的情况
- 结合四个原则来评价算法的优缺点
6.3 课后巩固
- 多做相关练习题
- 尝试分析不同执行顺序下的算法行为
- 理解为什么需要硬件支持来实现”检查和上锁”的原子性
七、与后续内容的联系
7.1 问题引出
- 皮特森算法虽然在逻辑上最完善,但仍有忙等的问题
- 双标志先检查法的思路是好的,但缺乏原子性支持
7.2 解决方向
- 下一节将学习硬件实现方法
- 硬件可以保证”检查和上锁”操作的原子性
- 这为解决软件方法的根本问题提供了基础
这些内容构成了操作系统进程同步与互斥的重要理论基础,是理解更高级同步机制的前提。
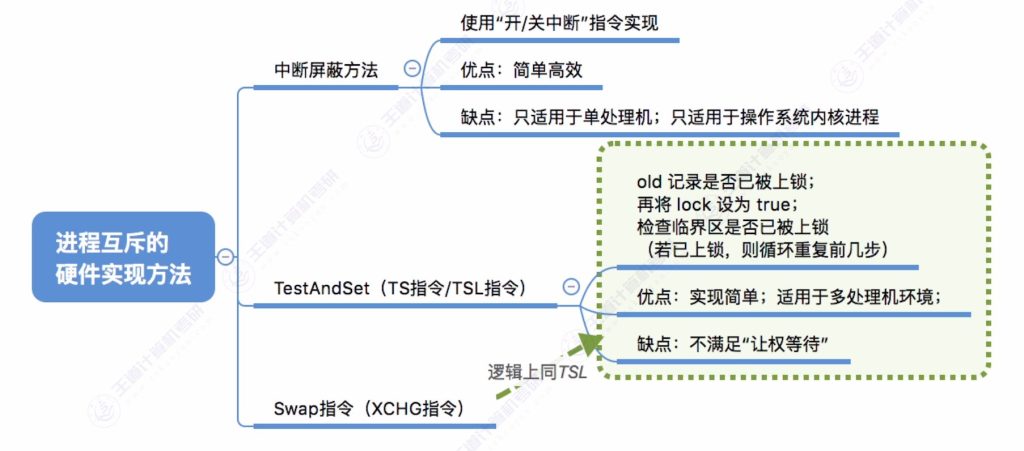
三、进程互斥的硬件实现方法
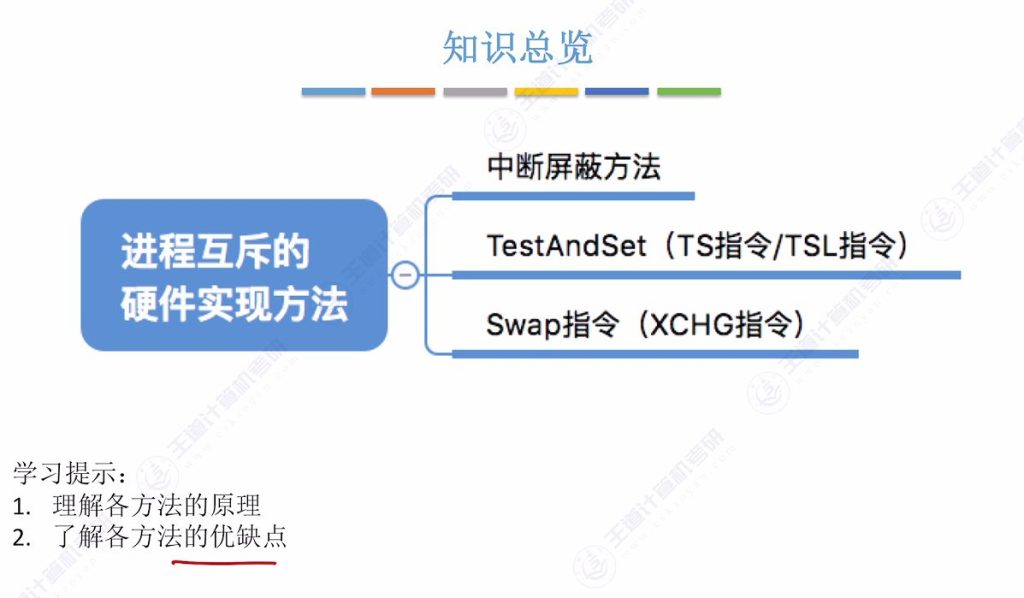
- 实现方式:包括中断屏蔽方法、TestAndSet(TS/TSL)指令和Swap(XCHG)指令三种
- 学习要点:需要理解各方法原理并掌握其优缺点
3.1 中断屏蔽方法
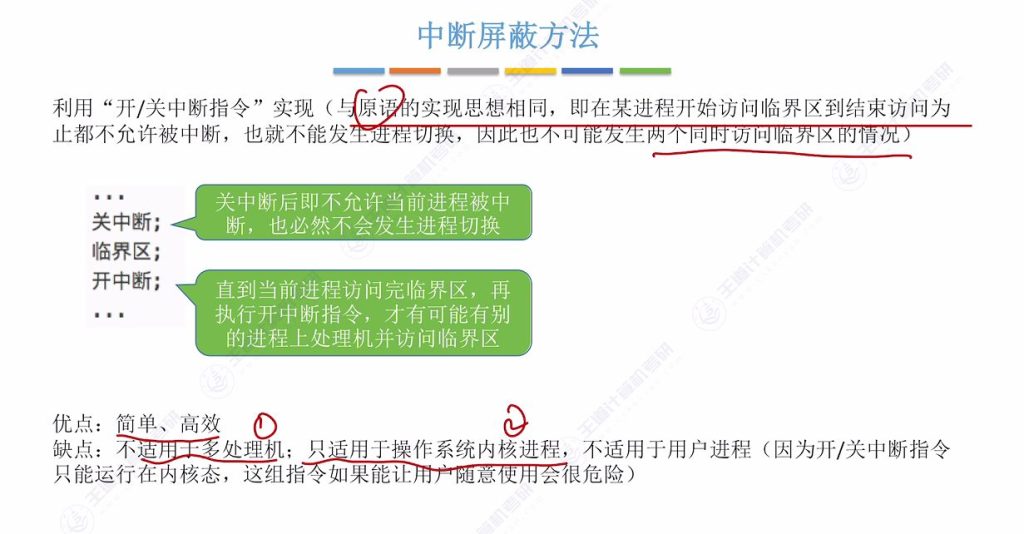
- 实现原理:通过”关中断”和”开中断”指令实现,与原语实现思想相同
- 进程访问临界区前执行关中断指令,禁止中断和进程切换
- 访问完成后执行开中断指令,允许其他进程访问
- 执行流程:关中断→临界区→开中断
- 优点:
- 实现简单高效
- 逻辑清晰
- 缺点:
- 仅适用于单处理机系统(多处理机环境下无法保证互斥)
- 需要特权指令(只能在操作系统内核态下运行)
- 不适用于用户进程
3.2 TestAndSet 指令
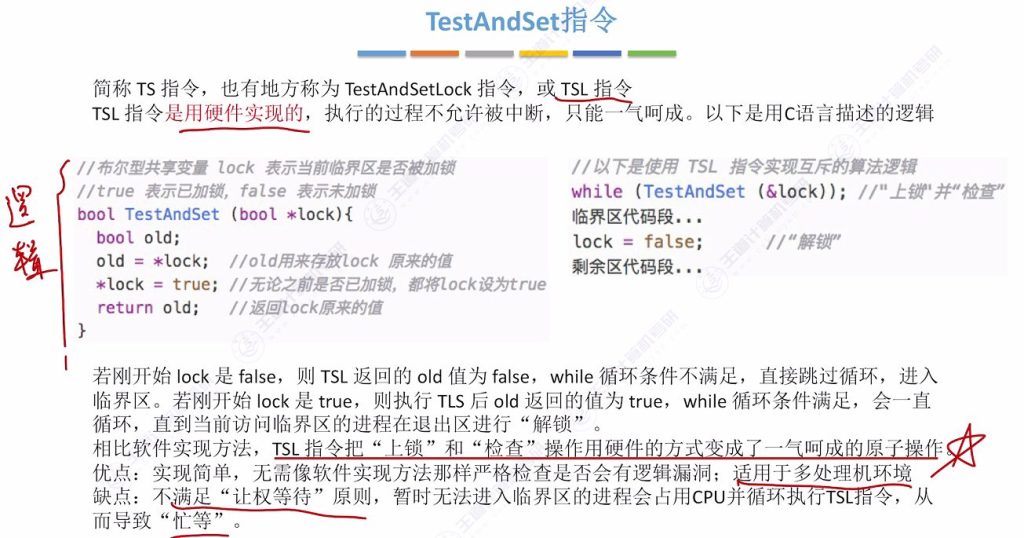
- 别名:TS指令/TSL指令(TestAndSetLock)
- 硬件特性:由硬件实现,执行过程不可中断
- 实现逻辑:
- 使用布尔型共享变量lock表示临界区状态(true表示已加锁)
- 指令操作:记录原锁状态→设置新锁状态→返回原状态
- 代码实现:
- 优点:
- 实现简单
- 适用于多处理机环境
- 检查和上锁操作一气呵成(解决软件方法的问题)
- 缺点:
- 不满足”让权等待”原则(进程会“忙等”)
3.3 Swap指令
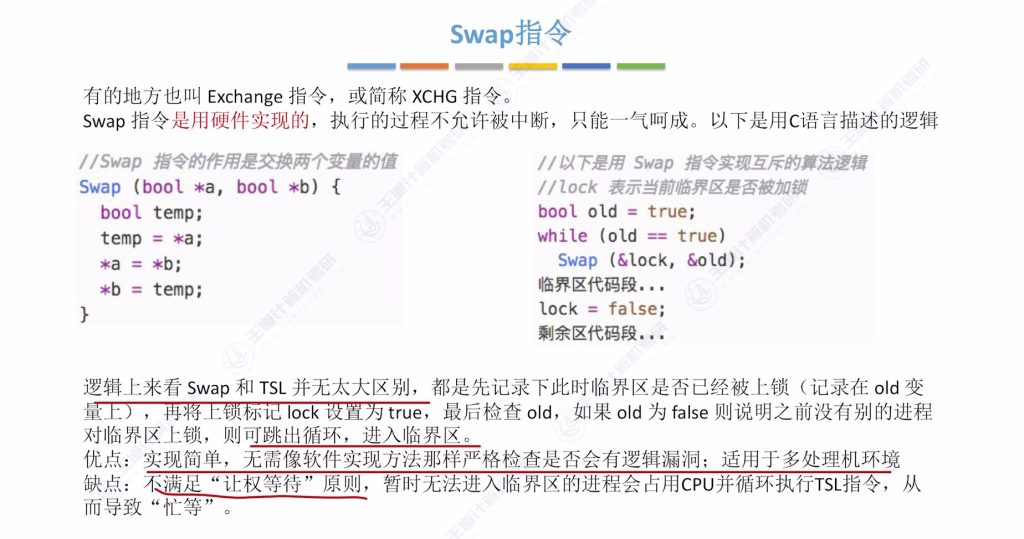
- 别名:Exchange指令/XCHG指令
- 硬件特性:由硬件实现,执行过程不可中断
- 实现逻辑:
- 交换两个变量的值
- 代码实现:
- 与TS指令比较:
- 逻辑功能相同(都是检查原状态并设置新锁)
- 硬件实现方式不同
- 优缺点:
- 同TS指令(实现简单、适用多处理机、但不满足让权等待)
3.4 知识总结
进程互斥硬件实现方法 – 考研复习要点
一、中断屏蔽方法
实现原理: 利用开中断和关中断两个指令 进程访问临界区前执行关中断指令,访问完毕后执行开中断指令 关中断期间,进程不可被中断,无法发生进程切换
优点: 实现简单高效 逻辑清晰
缺点:
- 不适用于多处理机系统 关中断指令只对执行该指令的处理机有效 其他处理机仍可正常切换进程,可能同时访问临界区
- 只能由内核进程使用 开关中断属于特权指令,需要在内核态下运行 用户进程无权限执行
二、TestAndSet指令(TSL指令)
实现原理:
bool TestAndSet(bool *lock) { bool old = *lock; // 记录原值 *lock = true; // 设置锁定状态 return old; // 返回原值 }硬件实现,不可被中断
使用方式:
while(TestAndSet(&lock)); // 循环检查直到获得锁 // 临界区代码 lock = false; // 释放锁特点: 检查和上锁操作一气呵成,不可被中断 解决了软件方法中检查和上锁分离的问题
三、Swap指令(Exchange指令)
实现原理:
void Swap(bool *a, bool *b) { bool temp = *a; *a = *b; *b = temp; }硬件实现,不可被中断
使用方式:
bool old = true; do { Swap(&lock, &old); } while(old); // 循环直到old为false // 临界区代码 lock = false; // 释放锁四、TSL和Swap指令对比
共同特点: 都是硬件实现,执行过程不可被中断 逻辑上实现相同功能:检查旧值并设置新值 优缺点相同
优点: 实现简单 适用于多处理机环境 硬件保证原子性操作
缺点: 不满足让权等待原则 进程在等待时会一直占用CPU进行”盲等” 造成处理机资源浪费
五、考试重点
名词理解: TSL指令 = TestAndSet指令 = TestAndSetLock指令 Swap指令 = Exchange指令 在408真题中可能出现不同表述方式
核心考点:
- 各方法的实现原理和执行过程
- 优缺点对比分析
- 适用场景和限制条件
- 硬件方法相比软件方法的优势
- 让权等待原则的理解
记忆要点: 中断屏蔽:简单但限制多(单处理机+内核进程) TSL/Swap:硬件原子操作,解决竞态条件,但存在忙等问题 共同问题:都不满足让权等待,会造成CPU资源浪费
六、与软件方法的对比优势
硬件方法解决了软件方法中检查和上锁操作非原子性的根本问题: 软件方法:检查→上锁(两步操作,可能被中断) 硬件方法:检查+上锁(一步完成,不可被中断)
四、互斥锁(新考点)
4.1 互斥锁的概念
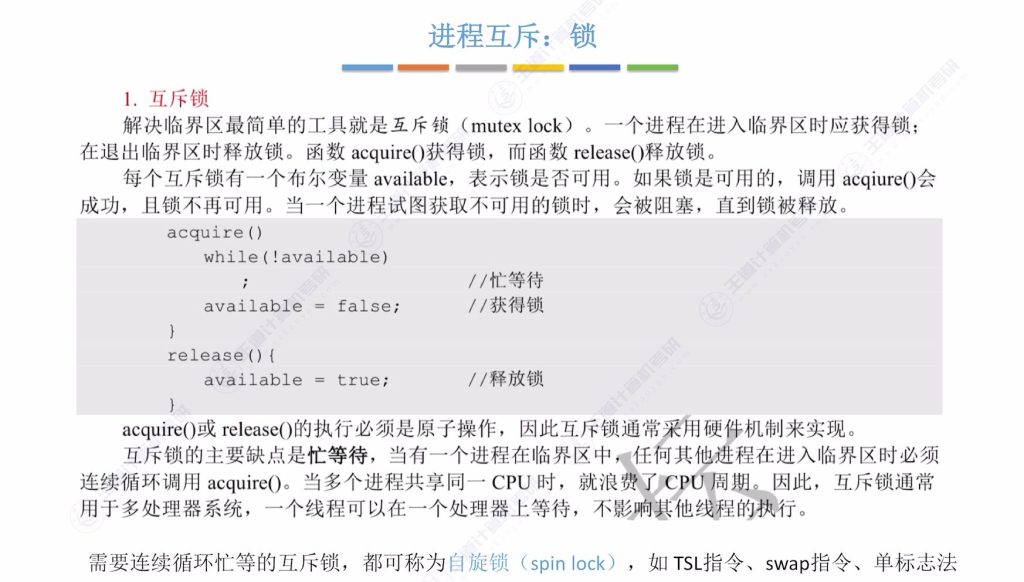
- 基本概念: 互斥锁(mutex lock)是实现进程互斥的最简单工具,通过布尔变量available表示锁状态(true/false或1/0)
- 操作函数:
- acquire(): 获取锁
- release(): 释放锁
- 原子性要求: 获取和释放锁的操作必须通过硬件机制保证原子性执行
4.2 锁的特性
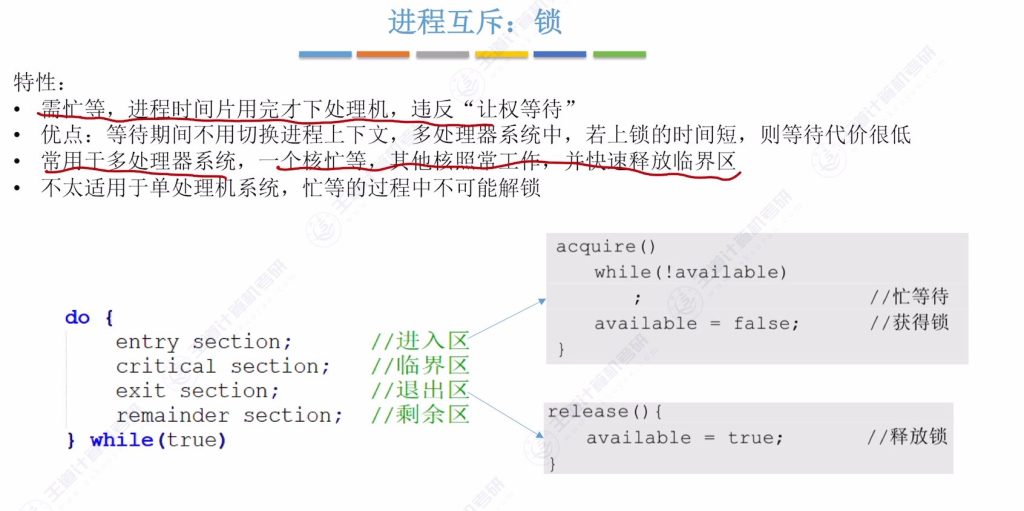
- 忙等机制: 当锁不可用时,进程会在acquire()中循环检查(while(!available)),直到锁被释放
- 主要缺点:
- 违反”让权等待”原则,持续占用CPU资源
- 单处理机系统中尤其低效,等待期间不可能解锁
- 适用场景:
- 多处理器系统优势:一个核忙等不影响其他核工作
- 临界区操作时间短时效率更高(避免上下文切换开销)
- 自旋锁分类:
- 包括TSL指令、swap指令、单标志法等实现方式
- 共同特征:都需要忙等待检查锁状态
- 时间片机制:
- 忙等进程仍受时间片限制,用完会被强制下处理机
- 并非持续独占CPU资源
- 性能权衡:
- 不切换上下文的优势:多核系统中若临界区操作快,总等待时间可能短于进程切换时间
- 典型应用:内核数据结构保护等短时操作场景
4.3 总结
锁机制与自旋锁 – 考研复习要点
一、锁的基本概念
定义: 锁是用于实现互斥的一种方法 可以简单理解为一个布尔型变量 只有true和false(或0和1)两种状态 分别表示当前已上锁或没有上锁
基本操作:
acquire(); // 上锁,获得锁 release(); // 释放锁二、用锁实现互斥的缺点
主要缺点: 盲等问题 – 如果进不了临界区,会不断while循环被卡住 导致CPU资源浪费 违反了让权等待原则
三、自旋锁的概念
定义: 由于盲等过程中需要不断循环检查,这一类锁称为自旋锁 自己在原地旋转,不断检查锁状态
包含的方法: TSL指令 Swap指令 单标志法 互斥锁
共同特点: 都用于解决进程互斥问题 都有盲等问题 都违反让权等待原则
四、盲等的时间片机制
重要说明: 进程在盲等时并不会一直占用处理机 如果进程时间片用完,调度程序依然会让它下处理机 盲等不等于永远占用处理机
五、自旋锁的优点
优势: 等待锁期间不需要切换进程上下文 进程上下文切换代价较大 在特定条件下,自旋等待代价反而很低
六、自旋锁的适用场景
多处理器系统中的优势: 条件:对临界区上锁时间很短 原理:
- 进程P1在一个核心自旋等待,只占用这一个核的计算能力
- 上锁的进程P2在另一个核心运行,可以快速使用临界区并解锁
- P1在自旋等待过程中能够快速发现解锁,立即进入临界区
- 没有进程切换,盲等代价很低
- 其他核可以照常工作
单处理机系统中的劣势: 问题:
- P1进程占用唯一一个核进行自旋等待
- 在当前时间片内不可能等到解锁
- 只有P1时间片用完,上锁进程上处理机并解锁后,P1才可能获得锁
- 自旋等待期间无法获得锁,纯属浪费
七、考试重点
核心概念:
- 锁的基本定义和操作
- 自旋锁的概念和特点
- 盲等问题及其影响
- 让权等待原则的违反
适用性分析:
- 多处理器系统 vs 单处理机系统
- 临界区上锁时间长短的影响
- 进程上下文切换成本考量
记忆要点: 自旋锁 = 盲等 = 违反让权等待 多处理器 + 短临界区 = 自旋锁有优势 单处理机 = 自旋锁效率低 时间片机制仍然有效,不会无限占用处理机
本网站原创文章版权归何大锤的狂飙日记所有。发布者:何大锤,转转请注明出处:何大锤的博客

